Derivations of Equations
Recall that the question that we are studying is:
Do there exist any curves 

 parameterized with respect to arclength such
that the positions of the front tire and back tire of a bicycle at time
parameterized with respect to arclength such
that the positions of the front tire and back tire of a bicycle at time  ,
respectively satisfy
,
respectively satisfy  and
and  for some positions
for some positions  and
and  of the curve
of the curve  ?
?
We will assume that the bicycle is ridden on a flat surface,
and that the bicycle is not banked into the ground, that is the plane of each
tire meet the ground in a right angle. We suspect that one can create a
unicycle track without these assumptions, but the equations become much more
complicated. In particular, using these
we have that
where L is the length of the bicycle and  is the unit tangent vector to the back tire
is the unit tangent vector to the back tire  at time t. Equation (1) arises from two simple observations concerning the
manner in which a bicycle is built. The
first observation is that the back tire is fixed in the frame, meaning that the
back tire and the frame are aligned.
This means that the tangent line to the back tire track at time t
is equal to the secant line through the front and back tire positions at time t,
that is
at time t. Equation (1) arises from two simple observations concerning the
manner in which a bicycle is built. The
first observation is that the back tire is fixed in the frame, meaning that the
back tire and the frame are aligned.
This means that the tangent line to the back tire track at time t
is equal to the secant line through the front and back tire positions at time t,
that is
The second observation is that the frame is rigid, meaning
that the distance between  the points of contact between the tires and
the ground is a constant independent if
the position of the tires.
the points of contact between the tires and
the ground is a constant independent if
the position of the tires.
Rather than express all the equations for describing the
tracks of a bicycle in terms of the tracks  and
and  ,
we describe the motion of the bicycle in terms of the angle
,
we describe the motion of the bicycle in terms of the angle  between the unit tangent vectors of the
tracks, the angle between the planes of the tires. We use this angle because when riding a bicycle, we have direct
control of this angle since by controlling the angle
between the unit tangent vectors of the
tracks, the angle between the planes of the tires. We use this angle because when riding a bicycle, we have direct
control of this angle since by controlling the angle  and the speed of the bicycle the position of
the bicycle. We require the angle
and the speed of the bicycle the position of
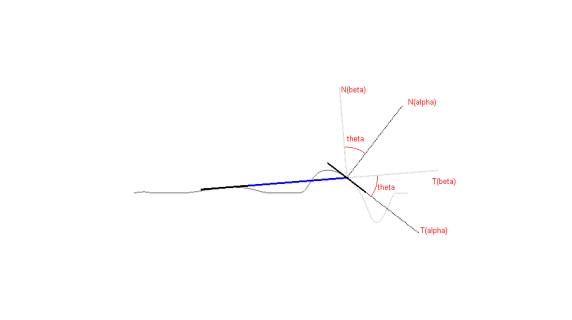
the bicycle. We require the angle  be signed and satisfy
be signed and satisfy  to distinguish between a right hand turn and
a left hand turn. A left-hand turn will
have a positive sign and right-hand turn will have a negative sign, see diagram
below. This convention allows us to
quantify left and right by using the principal unit normal vector N(t)
for the curve, which is given by
to distinguish between a right hand turn and
a left hand turn. A left-hand turn will
have a positive sign and right-hand turn will have a negative sign, see diagram
below. This convention allows us to
quantify left and right by using the principal unit normal vector N(t)
for the curve, which is given by
If  is positive then
is positive then  lies on the same side of
lies on the same side of  as
as  ,
while if
,
while if  is negative then
is negative then  lies on the same side of
lies on the same side of  as
as  ,
which from standard convention respectively corresponds to a left hand and a
right hand turn.
,
which from standard convention respectively corresponds to a left hand and a
right hand turn.
A principal use of the angle  is to convert between the two sets of
orthogonal basis vectors
is to convert between the two sets of
orthogonal basis vectors  and
and  . Using trigonometry and basic vector
arithmetic, we have
. Using trigonometry and basic vector
arithmetic, we have
By differentiating equations (1) to (3) with respect to
time, and using the Frenet frame equations, we derive the main equations needed
to construct a unicycle track with a bicycle.
Differentiating equation (1) respect to time, we get
where  is the signed curvature of the back tire
track, and
is the signed curvature of the back tire
track, and  and
and  are the arclength parameters of the curves
are the arclength parameters of the curves  and
and  respectively. There are a couple of important conclusions that we can make from
equation (4). Namely, that
respectively. There are a couple of important conclusions that we can make from
equation (4). Namely, that
and therefore
Equating the expression for  in (3) and (6), we find that
in (3) and (6), we find that
from which we get
Differentiating the equation for  in (3) with respect to t, we have
in (3) with respect to t, we have
which yields
Using that  ,
we have
,
we have
and thus implies that
The equations (8), (10), (11) allow us to construct a
bicycle track knowing the angle  as a function either arclength parameter
as a function either arclength parameter  or
or  since with this information we can solve the
Frenet frame equations to construct either the back tire track or the front
tire track. We could also solve the
Frenet frame equations knowing the angle
since with this information we can solve the
Frenet frame equations to construct either the back tire track or the front
tire track. We could also solve the
Frenet frame equations knowing the angle  and the speed
and the speed  of the back tire, which are of course the
physical controls of a bicycle.
of the back tire, which are of course the
physical controls of a bicycle.
It is also useful to have the curvature of the front tire in
terms of the curvature for the pact tire.
Differentiating (6) we have
thus
Equations (1), (6), (12) are useful for determining the
conditions needed on a bicycle track for it to be possible to create a unicycle
track with a bicycle. We need every
point on the front tire track to be a point on the back tire track. The equations (1), (6), (12) provide useful
relations between two points on the unicycle track, say  and
and  ,
that correspond to
,
that correspond to  and
and  . These equations say that for a unicycle
track to be created by a bicycle we need
. These equations say that for a unicycle
track to be created by a bicycle we need
where s is the arclength parameter on  and
and  is the parameter for
is the parameter for  . Repeatedly differentiating (12) with respect
to time or arclength we get conditions specifying the derivatives of the
curvature of
. Repeatedly differentiating (12) with respect
to time or arclength we get conditions specifying the derivatives of the
curvature of  when
when  in terms of the curvature and the derivatives
of the curvature when
in terms of the curvature and the derivatives
of the curvature when  . A cursory examination of these conditions
reveals that they are satisfied by having the curvature and the derivatives of
the curvature identically equal to zero when
. A cursory examination of these conditions
reveals that they are satisfied by having the curvature and the derivatives of
the curvature identically equal to zero when  and
and  .
.
To create a unicycle track with a bicycle, we first create a
track segment  with
with  ,
,
 ,
and the curvature and the derivatives of the curvature identically equal to
zero when
,
and the curvature and the derivatives of the curvature identically equal to
zero when  and
and  .
Pushing the bicycle forward on the initial track segment, we can extend the
segment to the interval
.
Pushing the bicycle forward on the initial track segment, we can extend the
segment to the interval  by using the formula
by using the formula
The conditions on the curvature imply that the curvature and
the derivatives of the curvature when  are identically equal to zero, and therefore
we can extend the unicycle track forward indefinitely. We can also push the bicycle backwards on
the initial unicycle track to extend the track for
are identically equal to zero, and therefore
we can extend the unicycle track forward indefinitely. We can also push the bicycle backwards on
the initial unicycle track to extend the track for  . However, we can only guarantee that the
bicycle can be pushed for a short amount of time and arclength in the backwards
direction at present time, because we generate the backward direction for the
unicycle track by solving a differential difference equation. The differential
difference equation comes from noticing that for a unicycle track that can be
created with a bicycle there exists for every time
. However, we can only guarantee that the
bicycle can be pushed for a short amount of time and arclength in the backwards
direction at present time, because we generate the backward direction for the
unicycle track by solving a differential difference equation. The differential
difference equation comes from noticing that for a unicycle track that can be
created with a bicycle there exists for every time  a time
a time  with
with  ,
and therefore at every point we have two methods for calculating the
curvature. Thus by equating the
curvature of the back tire track at time
,
and therefore at every point we have two methods for calculating the
curvature. Thus by equating the
curvature of the back tire track at time  to the curvature of the front tire track at
time
to the curvature of the front tire track at
time  ,
we have that the curvature of the unicycle track must satisfy
,
we have that the curvature of the unicycle track must satisfy
In terms of the angle  which controls the construction of the
bicycle, this is equivalent to the equation
which controls the construction of the
bicycle, this is equivalent to the equation
Given an initial segment,  ,
we can solve these differential difference equations for
,
we can solve these differential difference equations for  only.
If we attempt to solve for
only.
If we attempt to solve for  we would overwrite the initial segment and
the extension of the initial segment by
we would overwrite the initial segment and
the extension of the initial segment by  .
.